
Abstract –This article presents a report on the Procedure, Function, Science, Components required and Precaution to be taken for making a humanoid robot. A humanoid robot is a machine that looks and acts like a human. The process shown in this article can be used to make a robot at home. The method shown in this article can be used to make a simple bluetooth speaker which can be modulated to one’s preferences.
Keywords – MG996R servo motor, PCA9685 16-channel 12 bit PWM (pulse width modulation), Arduino UNO.
Introduction
A robot is a type of automated machine that can execute specific tasks that are given to it often with the help of a code. A robot is used to decrease human interference and the error rate. A humanoid robot is a machine that works and looks like a human. It can perform tasks like a human without any human intervention. This humanoid robot functions with motors situated at joints. The robot can walk and move its parts like a normal person. Humanoid robots are similar to service robots and decrease costs because it automates tasks and savings increase.
Components
Various components are used to make the robot. 17 dof humanoid robot kit, MG996R servo motor, PCA9685 16-channel 12 bit PWMdriver
17 DOF humanoid robot kit
The kit contains all the parts to assemble the humanoid robot. All parts are made up of non-organic material; it’s made up of metals like aluminum (Al) and other metal alloys.
MG996R servo motor
MG996R servo motor requires coding to function and move. The motor has 3 pins; the red pin is the vcc pin which goes to 5v of your microcontroller, the black pin goes to the gnd (ground) of your microcontroller and the yellow pin which is the PWM (pulse width modulation) pin goes to the digital input pins in the microcontroller. The motors used are high-torque servo motors.
Torque = F(Force) x r (sin theta)![]() moment of arm x angle between the arm and the Force vector
moment of arm x angle between the arm and the Force vector
Just as force is what causes an object to accelerate in linear kinematics, torque is what causes an object to acquire angular acceleration. When the angle is 90 degrees , then it is F x r because sin90 is 1. The capacity of the MG996R servo motor is nearly 6V.
PCA9685 16-channel 12 bit PWMdriver
The PCA9685 16-channel 12 bit PWM driver is used to connect and operate up to 16 servos together; and the work can be accomplished faster. It can control the output of the 16-channel PWM values (16 servos). The driver is used as an alternative to connect a good deal of servos. It has 4 main pins : VCC, GND, SCL(A4) AND SDA(A5). The capacity of the board is 4.8V to 7.2V. The board gets the signals from the Arduino and there is a port for external power supply.
The index number starts from 0 to 15 which are 16 numbers in total. This module applies the PCA9685 master chip as the controller.
We can manage the PWM frequency and duty cycle to control the servo precisely by programming the controller. The principle working is when a PWM signal is caught by the receiving channel and is transmitted to the signal demodulation circuit, then a DC offset voltage is generated. Next, the received voltage will be compared with the potentiometer’s voltage on the driver, and then the voltage drop between the received and the potentiometer will be used as an input to the motor driver which moves the motor clockwise or anti-clockwise. When the speed of rotation reaches a certain value, it will drive the potentiometer of the respected pin to spin by the cascaded gear reducer. The motor would not stop rotating until the voltage drop decreased to 0.
Arduino UNO
Arduino UNO is used as the microcontroller.
Procedure
Calibration
Calibrate the servos before they are fixed in their place to the initial servo position to make the robot stand. The angles in the form of a PWM signal have to be found. The maximum is found by checking the servos highest point ,to which it can turn. The minimum is found by the lowest point to which it can turn. 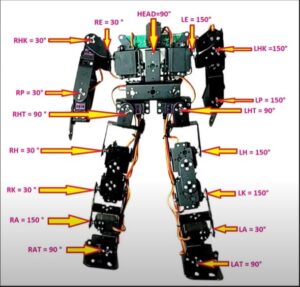
Care and Precaution
The servo motors should not be on for more than 15 minutes because the metal gears in them might expand causing a defect in the motors. All the screws should be tightened periodically.
Conclusion
Making a humanoid robot was part of the work and study cycle. The humanoid robot can be your next partner to entertain you. This robot is made to study human joints and to understand the reaction of them when pressure is applied on them.


